Book Categories:

With the rapid implementation of embodied intelligence technology, robots are expanding from single industrial scenarios to diverse fields such as service, medical treatment, scientific research, and consumer electronics.
As the core execution unit of a robot’s motion system, the performance of the joint module directly determines the load capacity, motion accuracy, battery life, and operational reliability of the entire robot.
In the development of lightweight robots, the small size, high torque, high precision, and easy integration of the TSL-GIM3510-8 joint module have become the core selection standards in the industry.
Table of Contents
Key Takeaways
- The TSL-GIM3510-8 module delivers a peak torque of 6N·m within an ultra-compact 46mm outer diameter.
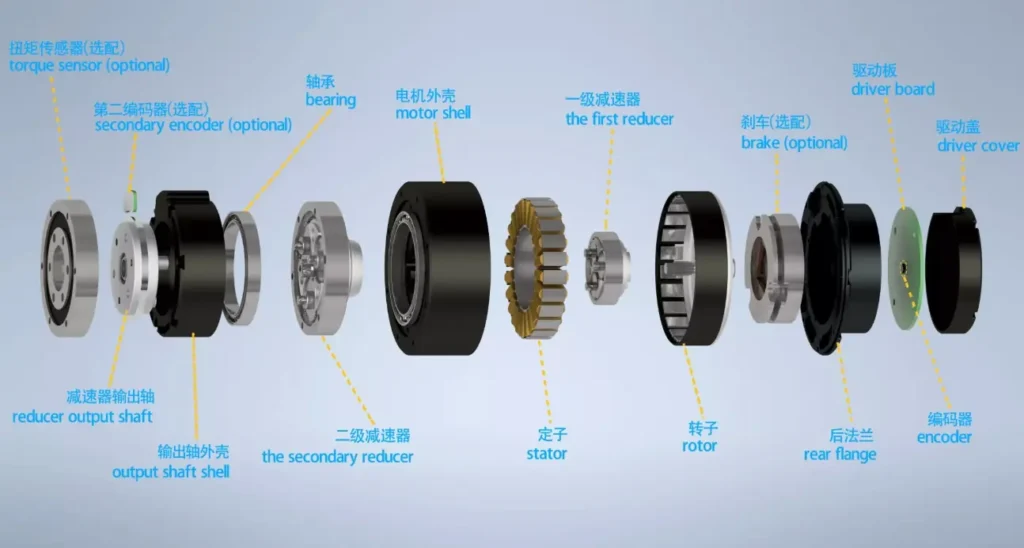
- The integrated architecture combines the motor, reducer, driver, and encoder into a single housing to simplify robot assembly.
- An optional dual-encoder system compensates for mechanical transmission errors to ensure high-precision motion control.
- The lightweight 260g design reduces the robot’s overall motion inertia and extends battery life effectively.
- The IP54 protection level guarantees reliable operation in diverse indoor service and scientific research environments.
- Standardized interfaces allow for rapid system integration via CAN protocols, shortening the product development cycle.
- Customized services enable the adjustment of winding parameters and reduction ratios to meet specific application needs.
Working Principle of Robot Joints
The core function of a robot joint is to realize attitude adjustment and spatial displacement of components such as robotic arms, dexterous hands, and mobile chassis through controllable rotational motion, serving as the foundation for robots to perform various operational tasks.
A complete robot joint execution system consists of the following five coordinated parts:
- Execution Output Unit: Joint output shaft, flange, and connecting bracket, which directly drive the load movement.
- Mechanical Support Unit: Precision bearings, housing, and sealing components, ensuring structural rigidity and operational stability.
- Power Drive Unit: Brushless DC motor that provides basic rotational power.
- Reduction Transmission Unit: Converts the motor’s high-speed, low-torque output into low-speed, high-torque output.
- Control and Feedback Unit: Composed of a servo driver and a position encoder, realizing closed-loop control of speed, torque, and position.
After the main control system sends motion commands, the servo driver converts the commands into motor drive signals. The motor outputs power, which is torque-amplified and speed-reduced via the reducer, and then drives the load movement through the output shaft.
The encoder collects real-time position and speed information from the motor end and output end, feeding it back to the control system to form a complete closed loop, ensuring accurate and consistent motion.
Core Role of Integrated Joint Modules in Robots
Traditional robot joints mostly adopt a split design of “motor + reducer + driver + encoder”, while integrated joint modules integrate all the above functions into a single housing, becoming the mainstream power solution for lightweight robots.
This integrated architecture precisely matches the core driving needs of various medium and large joints of robots:
- Drive for wrist and upper limb joints of humanoid robots: Supports the hand to perform a wide range of attitude adjustments, requiring compact size, sufficient torque, and high control precision of the module.
- Full-joint drive for desktop collaborative robotic arms: Drives the robotic arm to complete spatial handling, assembly, inspection, and other operations, requiring smooth operation, good dynamic response, and high safety of the module.
- Multi-joint drive for scientific research and educational robots: Used to verify motion control algorithms and robot prototypes, requiring high standardization, easy integration, and excellent cost performance of the module.
- Precision rotation joint drive for automated equipment: Realizes precise rotation of turntables, positioners, and loading/unloading mechanisms, requiring accurate positioning, high reliability, and long service life of the module.
Core Requirements of Lightweight Robots for Joint Modules
The joint module is one of the components with the highest weight and volume ratio in lightweight robots, and its performance parameters directly determine the design limit of the entire machine. Combined with the operating characteristics of lightweight robots, the core requirements for joint modules are mainly reflected in the following aspects:
Extremely high torque density
Lightweight robots’ load capacity is closely related to their own weight. The joint module is required to output as much torque as possible with minimal volume and weight, thereby improving the load-to-weight ratio of the entire machine, reducing energy consumption, and extending battery life.
High-precision motion control capability
The fine operation of robots relies on the precise positioning of joints. The module is required to effectively compensate for transmission errors, temperature drift, and mechanical deformation, ensuring that the repeat positioning accuracy and absolute positioning accuracy meet working condition requirements.
Compact integrated structure
The space of robot joints is extremely limited. The split design not only occupies a large amount of space but also increases assembly difficulty and system failure rate. The integrated design can maximize volume compression and simplify the assembly process of the entire machine.
Reliable environmental adaptability and durability
Robots need to operate stably for a long time in different indoor environments. The module is required to have certain dustproof and waterproof capabilities, as well as wear-resistant parts and long service life, reducing later maintenance costs.
Why the Industry Prioritizes Integrated Joint Modules
In the power selection of medium and large joints for lightweight robots, solutions such as stepper motors and ordinary brushless DC motors have obvious application shortcomings and cannot fully meet the comprehensive working condition requirements of joints. The integrated joint module effectively solves the pain points of traditional solutions through targeted system design, becoming the industry’s first choice.
Comparison with Stepper Motors
Stepper motors control rotation angles via pulse signals. They are prone to step loss or overshoot during open-loop operation, failing to ensure motion accuracy. Obvious resonance and jitter occur at low speeds, affecting the smoothness of robot operation.
Torque drops rapidly with increasing speed, unable to provide the continuous power required by joints. Meanwhile, stepper motors generate large heat and high energy consumption, severely shortening the battery life of battery-powered robots.
Comparison with Ordinary Brushless DC Motors (Split Type)
Ordinary brushless DC motors can only provide high-speed, low-torque output and must be additionally equipped with a reducer, driver, and encoder for joint driving. This split design not only occupies a large amount of space but also produces cumulative errors due to multiple connection links, reducing system accuracy.
In addition, customers need to complete component matching, mechanical assembly, and electrical debugging independently, with a development cycle of 3-6 months, and system reliability is difficult to guarantee.
The integrated joint module solves all the pain points of the above traditional solutions at the system level: it highly integrates a high-performance brushless DC motor, precision reducer, servo driver, and encoder, with all matching and calibration completed before delivery. Customers only need to quickly access it through standard interfaces.
Meanwhile, through optimized magnetic circuit and transmission design, it achieves extremely high torque density and energy efficiency ratio. Closed-loop control and optional dual encoders ensure high precision and reliability of motion.
| Performance Indicator | Stepper Motor | Ordinary Brushless DC Motor (Split Type) | TSL-GIM3510-8 Integrated Joint Module |
| Torque Density | Low, acceptable low-speed torque, sharp high-speed torque drop | Average, requires additional reducer | High, 23N·m/kg, 6N·m peak torque |
| Control Accuracy | Open-loop control prone to step loss, obvious low-speed jitter | Requires external encoder, large cumulative error | Closed-loop control, optional dual encoders, 5-8 times higher accuracy |
| Operation Smoothness | Poor, obvious low-speed resonance, cogging effect | Average, cogging torque exists | Excellent, optimized magnetic circuit design, smooth operation |
| Response Speed | Slow, large delay in start-stop and forward/reverse switching | Average, large moment of inertia | Fast, low moment of inertia, good dynamic response |
| Integration Level | Low, requires matching driver and reducer | Extremely low, scattered assembly of multiple components | High, integration of power, transmission, control, and sensing |
| Development Difficulty | Medium, requires debugging stepper drive parameters | High, requires independent matching of all components | Extremely low, plug-and-play via standard interfaces |
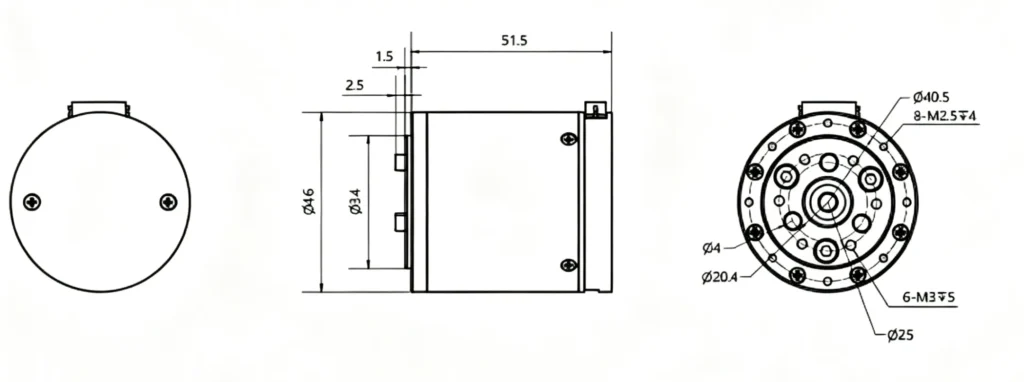
| Volume and Weight | Large, heaviest at the same torque | Large, split design occupies much space | Minimal, outer diameter 46mm, length 51.5mm, weight 260g |
| Energy Efficiency | Low, large heat generation, high no-load current | Average, low system efficiency | High, optimized energy efficiency design, extended battery life |
Advantages of TSL-GIM3510-8 Joint Module
The TSL-GIM3510-8 is an integrated joint module specially optimized for lightweight robots, built based on high-performance brushless DC motor technology. It is deeply designed for robot joint working conditions in structure, material, and performance, with outstanding adaptability and reliability.
Ultra-High Torque Density and Lightweight Design
By optimizing the motor magnetic circuit design and the transmission efficiency of the precision planetary reducer, the TSL-GIM3510-8 joint module achieves a peak torque of 6N·m with an outer diameter of only 46mm and a peak speed of 565RPM, easily meeting the power needs of various medium and large joints of lightweight robots.
With a total weight of only 260g, it effectively reduces the overall weight and motion inertia of the robot, improving dynamic response speed and battery life.
Integrated Compact Structure
The module adopts a flat coaxial design with an outer diameter of only 46mm and a total length of 51.5mm after installing the encoder, which can be easily embedded into the narrow joint space of robots.
The internal integrated housing design highly integrates the motor, reducer, driver, and basic encoder, reducing mechanical connection links and improving the overall rigidity and impact resistance of the system.
Meanwhile, the standardized output flange and electrical interface design greatly simplify the customer’s assembly and integration process.
Optional Dual-Encoder High-Precision Closed-Loop Control
Supports dual-encoder configuration at the motor end and output end, forming a dual feedback mechanism. The motor-end encoder is responsible for high-speed current loop and speed loop control, ensuring the system’s dynamic response performance.
The output-end encoder directly measures the actual output angle of the joint, effectively compensating for errors caused by reducer backlash, elastic deformation, and temperature drift, improving repeat positioning accuracy by 5-8 times.
In addition, the dual-encoder system provides natural fault diagnosis and redundant protection functions, enhancing the safety of robot operation.
Reliable Environmental Adaptability and Durability
The module reaches an IP54 protection level, effectively preventing dust intrusion and splashing water from any direction, suitable for various working environments such as general industrial workshops, laboratories, hospitals, and indoor services.
Core transmission components are made of high-strength wear-resistant materials, processed precisely and tested for strict service life, enabling long-term stable operation under frequent start-stop and forward/reverse switching working conditions, effectively reducing the later maintenance cost of equipment.
Overview of TSL-GIM3510-8 Integrated Joint Module
The TSL-GIM3510-8 is a highly integrated brushless DC integrated joint module equipped with a precision planetary reducer and servo driver, with core performance matching the working conditions of lightweight robot joints.
Dimensions
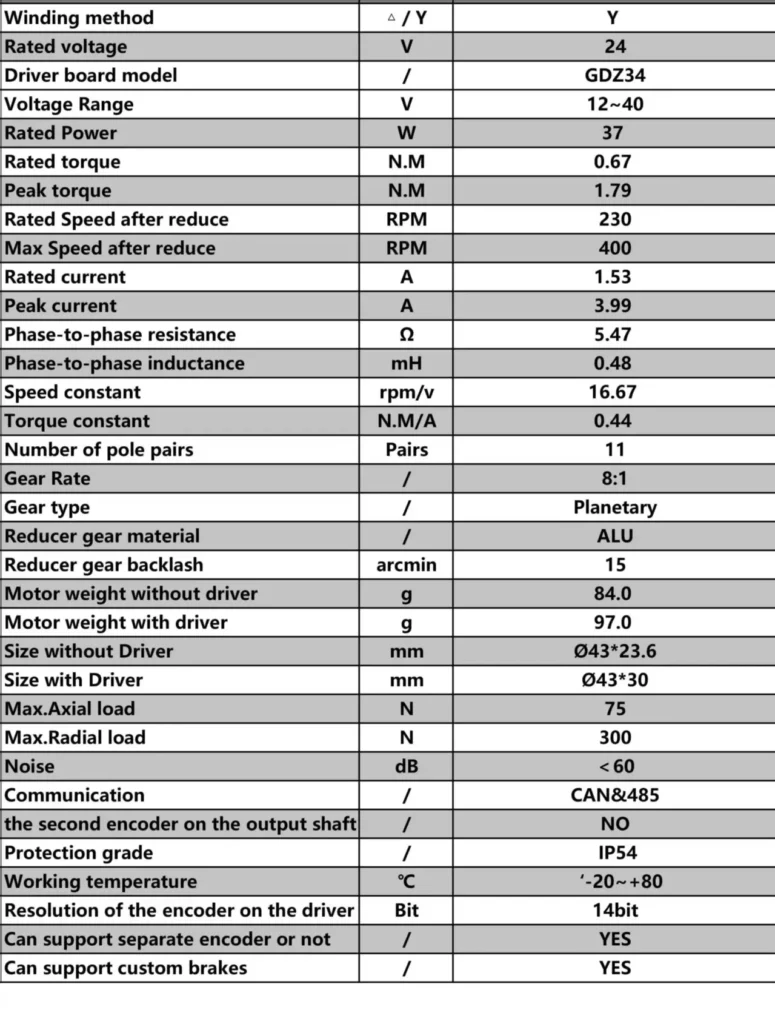
Core Performance Parameters
Typical Application Joints of TSL-GIM3510-8 Joint Module
The TSL-GIM3510-8 integrated joint module is specially designed for lightweight robot joints. With extreme volume and weight control, balanced torque-speed performance, and high-precision closed-loop control, it is perfectly suitable for the driving needs of various core joints of lightweight robots, making it the preferred power solution for lightweight robot joints currently.
Wrist and Upper Limb Joints of Lightweight Humanoid Robots
The wrist and forearm joints of lightweight humanoid robots have extremely limited space, while needing to support the hand to complete 360° rotation, multi-dimensional pitching, and complex actions such as grasping, handling, and operation, placing extremely high requirements on the module’s volume, torque, and precision.
The compact size of the TSL-GIM3510-8 module (46mm outer diameter, 51.5mm total length) can be seamlessly embedded into the narrow space of the humanoid robot’s wrist and forearm; the 6N·m peak torque is sufficient to support the hand to grasp daily items and meet the power needs of upper limb movement.
The optional dual-encoder configuration can accurately compensate for transmission errors, ensuring the delicacy and consistency of wrist attitude control and realizing anthropomorphic smooth motion.
Full Joints of Lightweight Desktop Collaborative Robotic Arms
4-6 DOF lightweight desktop collaborative robotic arms are widely used in scenarios such as precision assembly of 3C electronics, laboratory sample processing, and small material sorting, requiring lightweight joint modules, smooth operation, fast dynamic response, and human-computer interaction safety.
The TSL-GIM3510-8 module can serve as a unified joint power solution for such robotic arms. Its ultra-light weight of 260g greatly reduces the motion inertia of the robotic arm, improving the response speed of start-stop and forward/reverse switching, while reducing vibration and impact during movement.
The integrated design eliminates the need for additional transmission and control components, simplifying the assembly process of the robotic arm, reducing the overall weight and cost, and ensuring the safety of human-computer collaboration.
Joints of Lightweight Scientific Research, Education and Competition Robots
Lightweight prototype robots, legged robots, wheeled robots, etc., commonly used in university laboratories and robot competition platforms, have high requirements for the standardization, usability, and cost performance of joint modules.
The TSL-GIM3510-8 module adopts a standardized output flange and mainstream industrial communication protocols such as CAN, which can quickly connect to various open-source and commercial control systems without complex hardware adaptation and software debugging; it has stable and reliable performance and can withstand high-intensity, high-frequency use in scientific research experiments and competitions.
Meanwhile, the modular design facilitates quick replacement and maintenance, providing an ideal joint power platform for researchers to verify motion control algorithms and students to learn robot technology.
Head and Arm Joints of Lightweight Service Robots
Lightweight service robots such as commercial service robots and family companion robots need to realize 360° rotation and pitching adjustment of cameras and sensors through head joints, and complete simple item delivery and interactive operations through arm joints, requiring low power consumption, low noise, and stable operation of joint modules.
The TSL-GIM3510-8 module optimizes energy efficiency design, reducing energy consumption while ensuring power output, effectively extending the battery life of service robots; it produces low vibration and noise during operation, without interfering with service scenarios; its compact structure can be hidden inside the robot shell without affecting the overall appearance design and aesthetics.
Customized Services and Technical Support
As a professional brushless motor manufacturer, we not only provide standardized TSL-GIM3510-8 joint module products but also offer comprehensive customized services according to customers’ specific needs:
- Customization of motor winding parameters to adapt to different voltage and speed requirements.
- Adjustment of reducer ratio to optimize the matching relationship between torque and speed.
- Selection of encoder type and resolution to meet different precision requirements.
- Customization of communication protocols and electrical interfaces to be compatible with various control systems.
- Customization of output shaft form and flange size to adapt to different mechanical structures.
- Special protection level and environmental adaptability design to meet extreme working condition requirements.
We have a professional R&D team for motors and joint modules, able to provide customers with full-process technical support from scheme design, product selection to debugging and maintenance, helping customers efficiently solve various problems in the development process, shorten product development cycles, and improve product implementation efficiency.
Industry Development Trend and Future Outlook
Currently, lightweight robots are developing rapidly towards miniaturization, collaboration, intelligence, and low power consumption, putting forward higher requirements for the performance of joint modules.
In the future, robot joint modules will pay more attention to the improvement of integration, torque density, precision, and reliability, while developing towards modularization and standardization, further reducing customers’ development and use costs.
With the explosive growth of emerging fields such as humanoid robots, service robots, and industrial collaborative robots, the market demand for high-performance integrated joint modules will continue to expand.
We will continue to deepen brushless motor and joint module technology, constantly optimize product performance, and launch more power solutions that meet market needs, supporting the innovation and development of the robot industry.
Conclusion
With ultra-high torque density, compact integrated structure, optional dual-encoder high-precision control, and reliable environmental adaptability, the TSL-GIM3510-8 integrated joint module precisely matches the engineering needs of core joints of lightweight robots.
It effectively solves the application pain points of traditional solutions such as stepper motors and split-type brushless DC motors, and performs excellently in typical scenarios such as lightweight humanoid robots, desktop collaborative robotic arms, scientific research and educational robots, and service robots.
Combined with flexible customized services and professional technical support, the TSL-GIM3510-8 can provide a mature and practical joint power solution for various lightweight robots, helping customers improve overall machine performance and market competitiveness.
FAQs
Q1:Can the TSL-GIM3510-8 module directly replace a stepper motor?
A1:Yes. While maintaining a compact size, this module solves common stepper motor issues like step loss, low-speed resonance, and high heat generation. Its closed-loop control provides higher torque density and significantly better energy efficiency, which is ideal for battery-powered robots.
Q2:Which specific parts of a humanoid robot is this module best suited for?
A2:Due to its slim 46mm diameter and 260g weight, it is perfectly suited for wrist joints (rotation and pitch), forearm actuators, and head/neck gimbals, providing precise attitude adjustment and sufficient payload capacity for manipulation.
Q3:How can developers quickly integrate this module into existing systems?
A3:It features a “plug-and-play” integrated design. It supports standard communication protocols like CAN, allowing developers to skip complex component matching and mechanical assembly, realizing precise control over speed, torque, and position immediately.