Book Categories:

10kg-class quadruped robots are emerging as mainstream platforms for industrial inspection, household services, education, and scientific research. The core bottleneck restricting their large-scale commercialization lies in the cost and integration level of the power system.
The industry is currently facing a dual dilemma: high prices of dedicated joint motors and the lack of compact integrated gear drive products. This has led to excessively high overall machine costs and lengthy development cycles.
The TSL-GIM4305-10 planetary gear DC motor is compatible with the working conditions of the three core leg joints of 10kg-class quadruped robots: hip pitch, hip roll, and knee flexion/extension.
With its highly integrated design, fully detachable modular structure, and flexible customization capabilities, it effectively addresses the core pain points of traditional power solutions, providing a cost-effective engineering solution for the large-scale popularization of quadruped robots.
Table of Contents
Key Takeaways
- The TSL-GIM4305-10 motor provides a cost-effective integrated power solution specifically for 10kg-class quadruped robots.
- Centralized power architecture is fully supported by this motor’s compact dimensions, reducing leg inertia and improving response speed.
- The 150g lightweight design minimizes the total weight of moving parts, directly extending the robot’s operational battery life.
- A 3N·m peak torque ensures the motor can handle the extreme impact forces encountered during jumping and climbing tasks.
- Highly integrated “3-in-1” design (motor, reducer, and driver) eliminates complex wiring and reduces potential failure points.
- Fully detachable modular structures allow for easy on-site maintenance and component-level replacement, a rarity in the industry.
- Comprehensive customization services enable developers to tailor winding parameters and gear ratios to specific gait requirements.
Leg Power System Architecture of 10kg-Class Quadruped Robots
Typically, a quadruped robot is equipped with 12 planetary gear DC motors to achieve locomotion. The robot performs complex movements such as walking, running, turning, climbing, and jumping through the coordinated rotation of multiple leg joints, which forms the basis for task execution.
10kg-class quadruped robots generally have 3 rotational degrees of freedom per leg, corresponding to knee flexion/extension, hip pitch, and hip roll. All power units are centrally mounted at the connection between the body and the leg (i.e., the top of the leg).
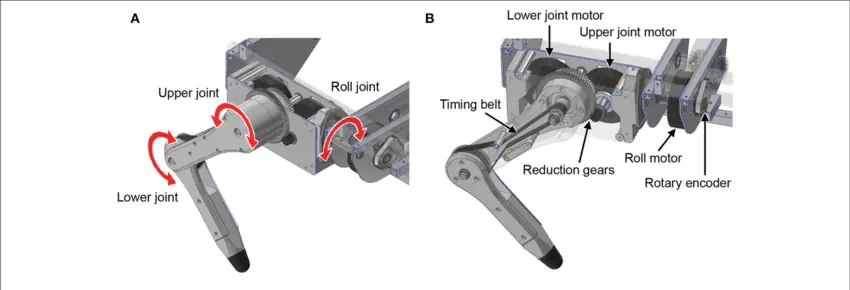
Knee flexion/extension transmits power to the knee and ankle joints via rigid links. This centralized power layout minimizes leg motion inertia, enhancing the robot’s dynamic response and movement flexibility.
Functions and Working Characteristics of the Three Core Leg Joints
The three motors at the top of each leg have clear divisions of labor to enable all robot movements:
Knee flexion/extension joint
Drives leg links through the meshing of an output gear and a partial gear to perform flexion/extension. It is the core power source for standing, walking, running, and jumping.Working characteristics: highest motion frequency, maximum impact load, and strict requirements for shock resistance, smooth operation, and energy efficiency.
Hip pitch joint
Mounted coaxially with the knee motor, it drives the knee motor and the entire leg module to swing back and forth, enabling gait switching, leg lift height adjustment, and posture control.Working characteristics: moderate torque demand, high dynamic response requirements.
Hip roll joint
Mounted on the base connecting the body and leg, it drives the entire leg module to rotate around a vertical axis, enabling sideways walking, twisting, turning, and lateral posture adjustment.Working characteristics: low speed, small torque demand, and strictest requirements for volume and weight.
Core Motor Requirements for Centralized Power Architecture
Based on the centralized power architecture and working characteristics of the three joints, 10kg-class quadruped robots impose the following core requirements on drive motors. Failure to meet any requirement directly impacts overall machine performance and usability:
Extreme volume and weight control
Installation space at the leg top is extremely limited, and the total weight of 12 motors accounts for over 60% of the total moving parts. Excessive motor weight increases leg inertia, slowing dynamic response, raising energy consumption, and shortening battery life. Motors must deliver sufficient power in the smallest and lightest form.
Balanced torque-speed characteristics
Must cover the working conditions of all three joints: peak torque ≥3N·m to withstand landing impact from jumping, rated speed ≥100RPM to meet walking and running speeds, and stable torque output across a wide speed range.
High integration design
Must integrate a reducer and servo driver to avoid volume expansion, complex wiring, and error accumulation caused by separate components. A split design for 12 motors would add dozens of cables, exponentially increasing system failure rate.
High smooth operation and energy efficiency
Knee motors consume over 50% of total robot energy. Their smooth operation directly determines gait stability and noise level. Motors require low cogging torque and vibration to extend battery life.
Strong shock resistance and high reliability
Instant impact load during landing can reach 3–5 times the rated load. Motors operate under frequent start-stop and forward/reverse switching. Core transmission parts must be high-strength, wear-resistant, with a service life ≥1000 hours.
Standardization and interchangeability
Uniform mechanical and electrical interfaces simplify assembly, reduce inventory and maintenance costs. A universal motor design enables full interchangeability between the three joints, eliminating the need for spare parts for different joints.
Technical Limitations of Mainstream Global Power Solutions
Current mainstream power solutions for 10kg-class quadruped robots fall into three categories, each with insurmountable limitations that fail to balance performance, cost, and integration.
High-End Dedicated Integrated Joint Motors
Adopted by leading global quadruped robot manufacturers, these self-developed motors offer excellent performance and high integration but have critical drawbacks:
- Prohibitive cost: Unit price >$300, total cost for 12 units >$3600, accounting for over 60% of the total BOM cost—unfeasible for consumer and educational mass production.
- Limited supply and customization: Core technology is proprietary; only restricted general versions are sold, with no customization support for developer-specific needs.
- High maintenance cost: Fully sealed non-detachable design; faulty units must be replaced entirely, increasing long-term maintenance costs.
Standard Separated Brushless DC Motors
The primary choice for small and medium developers worldwide, but with significant technical flaws:
- Very low integration: Requires separate purchase, matching, assembly, and debugging of motors, reducers, drivers, and encoders—development cycle 3–6 months.
- Large volume and weight: Discrete components occupy valuable leg space and significantly increase overall weight and motion inertia.
- Insufficient system accuracy: Multiple connection points cause cumulative errors, degrading motion accuracy and gait stability.
- Poor reliability: Complex wiring leads to loose connections and signal interference, with a much higher failure rate than integrated solutions.
Other General Integrated Motors on the Market
Recent general integrated motor products are not optimized for 10kg-class quadruped robot working conditions, with common issues:
- Mismatched dimensions: Outer diameter >50mm, incompatible with the narrow installation space at the leg top.
- Incomplete integration: Most only integrate motor and reducer, requiring external drivers—no true plug-and-play.
- Poor structural design: Fully sealed non-detachable, no internal part replacement or repair.
- Insufficient cost-performance: Lower than high-end dedicated motors but still not cost-effective for mass production.
| Comparison Item | High-End Dedicated Integrated Joint Motor | Standard Separated Brushless DC Motor | Other General Integrated Motors | TSL-GIM4305-10 General Integrated Motor |
| Unit Cost | >$300; 12 units >$3600, >60% of total BOM | ~$80–120 (all parts included) | ~$150–200 | Much lower than high-end solutions, suitable for mass production |
| Integration Level | High (motor + gear + driver + encoder) | Very low (4 separate parts) | Medium (motor + gear only) | High (motor + gear + driver integrated; encoder optional) |
| Typical Outer Diameter | 45–50mm | >60mm (with external driver) | >50mm | 47mm |
| Weight with Driver | 180–220g | >250g | 160–200g | 150g |
| Development Cycle | Short (plug-and-play) | 3–6 months (self-matching & debugging) | 1–2 months (external driver required) | 1–2 weeks (standard interface, plug-and-play) |
| Customization | None (only restricted general version) | Limited (self-modification required) | None (fully sealed standard) | Full support (windings, gear ratio, interfaces, etc.) |
| Maintainability | Poor (fully sealed, replace entire unit on failure) | Fair (disassemblable but inconsistent parts) | Poor (fully sealed non-detachable) | Excellent (fully detachable, full replacement parts available) |
| System Accuracy | High | Low (cumulative errors) | Medium | High (closed-loop control, dual encoders optional) |
| System Reliability | High | Low (complex wiring, high failure rate) | Medium | High (integrated design, fewer connections) |
Advantages of TSL-GIM4305-10 General Integrated Motor
The TSL-GIM4305-10 is a proprietary universal integrated power product specially developed for 10kg-class quadruped robots. It has undergone thorough engineering optimization in structural design, material selection, and performance tuning, fully resolving all pain points of traditional solutions.
Ultra-Compact and Lightweight Design
TSL-GIM4305-10 features a flat coaxial structure with an outer diameter of only 47mm, total length of 26mm, and a weight of just 150g (integrated driver included).
This extreme miniaturization fits easily into the narrow leg-top installation space, reduces leg motion inertia, and improves dynamic response and battery life.
Highly Integrated System Design
The product integrates a high-performance brushless DC motor, precision planetary reducer, and servo driver into a single housing, with full factory calibration and matching.
Developers avoid sourcing and assembling discrete components; connection to the control system via a standard electrical interface enables rapid integration, drastically shortening development cycles and lowering failure rates.
Balanced Dynamic Performance
TSL-GIM4305-10 has a rated power of 20W and peak torque of 3N·m, reliably supporting standing, walking, turning, and other basic movements. It offers strong shock resistance for light climbing and jumping.
Optimized magnetic circuit design and precision planetary gearing deliver system efficiency >85%, significantly extending battery runtime.
Innovative Fully Detachable Structure
Unlike most non-disassemblable integrated motors on the market, TSL-GIM4305-10 uses a fully detachable modular structure. Users can replace internal gears and core transmission parts for easy modification, maintenance, and testing.
Reliable Environmental Adaptability
The product has an IP54 protection rating, resisting dust ingress and splashing water from all directions. Operating temperature ranges from -20℃ to +80℃, suitable for most indoor and outdoor environments.
Core transmission parts are made of high-strength wear-resistant alloy steel. It has passed 1000 hours of continuous operation testing and remains stable under frequent start-stop and forward/reverse switching.
Flexible Options and Customization
TSL-GIM4305-10 supports rich configurations:
- Basic version: gear motor body for developers with mature drive and feedback systems.
- Integrated driver version: direct connection to control systems.
- Encoder version: high-precision closed-loop control for demanding accuracy applications.
We provide full customization services, including motor winding parameters, reducer ratios, encoder types, communication protocols, output shaft styles, and more, tailored to global customer requirements.
Global Customization and Technical Support
As a professional DC motor manufacturer with over 15 years of R&D and production experience, we have established a complete global customization and technical support system.
We offer both standard TSL-GIM4305-10 products and one-stop services from solution design, product development to mass production for global customers.
Our customization covers:
- Motor winding parameter customization for different voltages and speeds
- Reducer ratio adjustment to optimize torque-speed matching
- Encoder type and resolution selection for accuracy requirements
- Communication protocol and electrical interface customization for control system compatibility
- Output shaft and flange dimension customization for mechanical structure adaptation
- Special protection and environmental adaptation for extreme working conditions
Our multilingual technical support team of senior motor engineers provides end-to-end support from solution design, selection, and debugging to maintenance, helping customers resolve development issues, shorten cycles, and accelerate commercialization.
TSL-GIM4305-10 and other integrated gear motors are available on our global online store, supporting multi-currency payment and worldwide delivery for easy global procurement.
Industry Trends and Future Outlook
The quadruped robot industry is at a critical growth stage and will experience explosive expansion in the coming years. With technological advancement and cost reduction, quadruped robots will be widely adopted in industry, agriculture, services, healthcare, and other sectors.
Future power system trends for quadruped robots:
- Universality and modularization: Universal power modules will dominate, with standardized interfaces and protocols for cross-manufacturer interoperability.
- Higher integration: Further integration of motors, reducers, drivers, encoders, and sensors to reduce size and weight.
- Cost reduction: Lower power system costs via economies of scale and technological innovation to drive mass adoption.
- Intelligence: Integration of smart sensors and algorithms for self-diagnosis, self-calibration, and adaptive control.
We will continue to focus on DC motor and gear transmission technologies, optimize product performance, and launch more power solutions for the global market. We believe that close cooperation with global developers and manufacturers will drive innovation in the quadruped robot industry and accelerate global intelligentization.
Conclusion
The TSL-GIM4305-10 planetary gear DC motor targets global common pain points in 10kg-class quadruped robot development. With high cost-performance, integration, and flexibility, it offers a new universal power option for global quadruped robot developers.
Its ultra-compact lightweight design, balanced dynamic performance, fully detachable structure, and reliable environmental adaptability fully meet the drive requirements of consumer, educational, and light industrial quadruped robots.
Backed by our comprehensive global customization and professional technical support, TSL-GIM4305-10 is set to become the preferred power solution for 10kg-class quadruped robots, enabling rapid commercialization and popularization of more quadruped robot products and ushering in a new era of large-scale development for the industry.
FAQ
Q1:Can the TSL-GIM4305-10 be used for all joints of a 10kg quadruped?
A1:Yes. It is designed as a universal power module. With a peak torque of 3N·m and an ultra-compact 47mm diameter, it is fully compatible with the hip roll, hip pitch, and knee flexion/extension joints, allowing for total interchangeability across the robot’s 12 degrees of freedom.
Q2:How does the motor handle high-impact loads during jumping or landing?
A2:The motor features high-strength alloy steel planetary gears specifically optimized for impact resistance. It can withstand instantaneous loads of 3–5 times the rated torque, making it ideal for the dynamic stresses of running and jumping.
Q3:Does the integrated driver support standard robotic control protocols?
A3:Absolutely. The integrated version is designed for “plug-and-play” use, typically supporting common communication protocols like CAN or RS485. This allows developers to connect the motor directly to the main controller without external motor drivers.