Book Categories:

With the rapid development of humanoid robots, collaborative robots, precision assembly, and medical rehabilitation robots, dexterous hands with human-like fine manipulation capabilities have become the core end-effector components for the commercialization of robots across multiple scenarios.
As the only joint in a dexterous hand capable of opposable movement, the thumb is responsible for over 60% of the hand’s grasping and pinching functions. The performance of its drive module directly defines the upper limit of the dexterous hand’s core capabilities.
The PG16K128-KW1618+LG04M20Z thumb grasping motor module is specially developed for the working conditions of the robot dexterous hand thumb. It is an integrated drive solution combining a coreless brushless motor, precision reduction, position sensing, and temperature protection. It comprehensively addresses existing industry pain points and provides a cost-effective engineering option for the large-scale deployment of dexterous hands.
Table of Contents
Key Takeaways
- Must fit within a 16 mm diameter to reside inside the palm.
- Deliver strong grasping force while maintaining a lightweight profile.
- Ensure transmission play is under 1.5° for precision pinching.
- Prevent object slippage during power-off or holding states.
- Utilize low-inertia coreless rotors for millisecond-level reaction speeds.
- Combined motor, gearbox, and sensors in one unit to simplify wiring.
- Withstand frequent start-stop cycles and high-frequency forward/reverse switching.
Drive Architecture of the Dexterous Hand Thumb
The thumb of a general anthropomorphic dexterous hand typically has 2–3 rotational degrees of freedom, corresponding to metacarpophalangeal (MCP) flexion/extension, MCP adduction/abduction, and interphalangeal (IP) flexion/extension.
All power units must be compactly installed inside the palm, with extremely limited mounting space, and the outer diameter of core drive components is generally restricted to the 16 mm class.
This compact built-in drive architecture minimizes hand motion inertia and enhances the dynamic response and operational flexibility of the dexterous hand. However, it also imposes strict requirements on the volume and integration level of the drive module.
The three core joints of the dexterous hand thumb work together to perform various complex manipulation tasks:
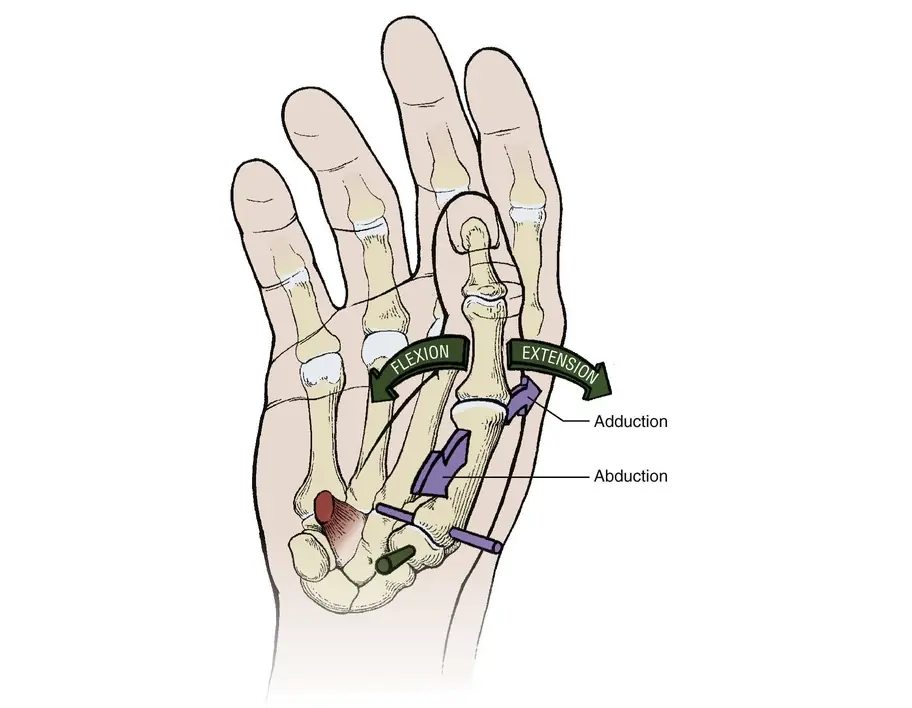
- Metacarpophalangeal flexion/extension joint: The main power source for opposable grasping and high-load holding of the thumb.
- Metacarpophalangeal adduction/abduction joint: Adjusts the opening and closing angle of the thumb to adapt to grasping objects of different sizes and shapes.
- Interphalangeal flexion/extension joint: Assists in fine pinching tasks such as picking tiny parts and assembling precision components.
Core Requirements for Drive Motors of the Dexterous Hand Thumb
Based on the compact built-in drive architecture and working characteristics of the three joints, the dexterous hand thumb imposes the following core requirements on its drive motor:
Ultimate volume and weight control
The extremely limited internal mounting space of the palm requires the outer diameter of the drive module to strictly comply with the 16 mm-class restriction. Meanwhile, the module weight must be minimized to avoid increasing hand motion inertia, which would impair the overall dynamic response and load capacity.
Balanced torque-speed characteristics
Must cover both fast thumb movement and high-load grasping. After reduction, it should deliver stable low-speed high-torque output with load torque meeting grasping demands, while enabling fast response under no-load conditions to suit various operational scenarios.
Highly integrated design
Must integrate the motor body, reducer, position sensor, and temperature protection unit in one piece to avoid volume expansion, complex wiring, and error accumulation caused by split-type designs, reducing overall wiring complexity and system failure rate of the dexterous hand.
Low backlash and high running smoothness
Fine manipulation demands strict control over transmission backlash, which must be minimized. Vibration and noise during operation must also be low to meet human-robot collaboration requirements.
Reverse self-locking and high reliability
Must maintain power-off holding during grasping to prevent object slippage. Core transmission components must be high-strength and wear-resistant for stable long-term operation under frequent start-stop, forward-reverse switching, and shock load conditions.
Standardization and adaptability
Adopt standardized mechanical and electrical interfaces compatible with different dexterous hand thumb joint designs, lowering developer selection and adaptation difficulty and shortening overall development cycles.
Why Choose a Brushless Coreless Motor Module
Because the thumb drive module of a dexterous hand demands tight constraints on size, precision, torque, reliability, and integration, a brushless coreless motor module is the best choice. This is the foundation of our PG16K128‑KW1618+LG04M20Z thumb‑grasping motor module.
Pain Points of Conventional Brushed Geared Motors
Conventional brushed geared motors are the mainstream choice for low-cost prototype development, but their structural flaws make them unsuitable for the exclusive working conditions of the dexterous hand thumb.

Conventional brushed geared motors contain an iron core, carbon brushes, and a mechanical commutator. Within the ultra-small 16 mm outer diameter limit, the effective winding layout space is drastically compressed, severely limiting power output. They typically fall into a dilemma: meeting volume requirements means insufficient torque, while meeting torque requirements means exceeding size limits.
Brushed motors rely on mechanical contact between carbon brushes and the commutator for commutation, inevitably causing mechanical friction, commutation sparks, and torque ripple. At low speeds, jitter and crawling often occur, failing to meet the positioning needs of fine thumb pinching.
The rotor of a brushed motor includes an iron core and commutator, resulting in high rotational inertia and severely delayed acceleration/deceleration response. It cannot quickly follow control commands, leading to motion delay and overshoot, directly undermining the accuracy and timeliness of thumb grasping.
Pain Points of Micro Servos
Micro servos are commonly used by small developers for prototyping, but their structural and performance designs are inherently incompatible with mass production and practical deployment of dexterous hand thumbs.
Most ordinary micro servos use potentiometer feedback + plastic gear sets, with transmission backlash generally above 3°—exceeding 5° in some low-cost models. Excessive backlash directly invalidates thumb opposable movement and tiny-part pinching, making fine manipulation impossible.
Core transmission gears of micro servos are mostly engineering plastic, which is prone to tooth stripping or fracture under instantaneous shock loads during thumb grasping and holding. Meanwhile, servos have weak continuous load capacity, suffering from overheating, step loss, and torque decay during long-term heavy holding. They lack reverse self-locking, so grasped objects easily slip after power failure, failing core thumb requirements.
The brushed motor + plastic gear combination of micro servos leads to fast gear wear and short service life under frequent start-stop, forward-reverse, and shock-load thumb conditions. Their fully sealed non-detachable design requires full replacement upon failure, resulting in high maintenance costs.
Pain Points of Brushed Coreless Geared Motors
Although brushed coreless motors eliminate the iron core, they retain carbon brushes and mechanical commutators, only slowing wear compared to conventional brushed motors.
Under high-frequency start-stop and forward-reverse thumb working conditions, carbon brushes still wear continuously and require periodic disassembly and replacement, precluding maintenance-free long-term operation and increasing post-production maintenance costs.
Mechanical commutation of brushed coreless motors continuously generates electric sparks, causing severe electromagnetic interference (EMI). The dexterous hand palm integrates numerous high-precision sensitive components such as tactile and force sensors; EMI directly distorts sensor signals and disables feedback, stripping the dexterous hand of its core tactile perception capability.
Mechanical commutation friction loss limits the overall efficiency of brushed coreless motors to approximately 45%, significantly increasing power consumption and shortening battery life for humanoid robots with limited battery capacity.
PG16K128 - KW1618 + LG04M20Z Thumb Grasping Motor Module for Dexterous Robot Hand Thumb
| Comparison Item | Conventional Brushed Geared Motor | Micro Servo | Brushed Coreless Geared Motor | Brushless Coreless Module (This Product) |
| Adaptation to 16 mm coaxial mounting space | Incompatible | Totally mismatched | Compatible but limited power | Perfectly compatible |
| Transmission backlash | ≥3° | ≥3° | ≥1.5° | ≤1.5° |
| Reverse self-locking capability | None | None | Optional | Built-in worm gear self-locking |
| Operating noise | High | Medium-high | Medium | Low (motor ≤45 dB) |
| Service life | Short (carbon brush wear) | Depends on motor and gear set | Medium (carbon brush wear) | Extra-long (no mechanical wear) |
| Dynamic response capability | Low | Medium | Medium-high | Ultra-high (low inertia, millisecond response) |
| Electromagnetic interference | High | Medium | Medium-high | Ultra-low |
| Integration level | Low | Medium | Medium | High (integrated sensing and protection) |
| Development cycle | Long (split-type requires self-tuning) | Medium | Medium | Short (plug-and-play) |
| Long-term maintenance cost | High | High | Medium | Ultra-low (maintenance-free) |
Advantages of the PG16K128-KW1618+LG04M20Z Module
The PG16K128-KW1618+LG04M20Z is an integrated drive module specially developed for the robot dexterous hand thumb. It features a 16 mm planetary gearbox + 16 mm coreless brushless motor + worm gear reverse output structure, perfectly solving core pain points of traditional solutions.
Miniaturization
The module adopts a coaxial structure with a 16 mm outer diameter, perfectly fitting the 16 mm-class narrow mounting space of the dexterous hand thumb. It can be directly embedded inside the palm and connected to the thumb joint without additional transmission structures, maximizing internal palm space savings.
Its lightweight design effectively reduces the motion inertia of the thumb joint, significantly improving dynamic response and operational flexibility.
Integration
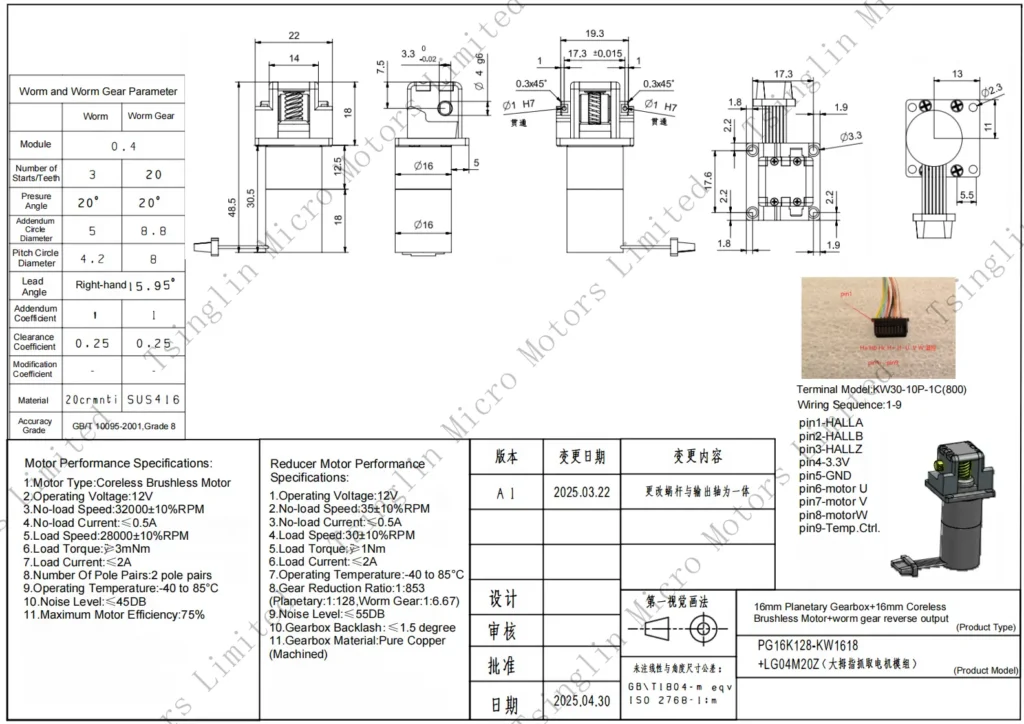
The product highly integrates a high-performance coreless brushless motor, 1:853 high-reduction-ratio precision reducer, Hall position sensor, and temperature control unit in a single housing, with full component matching and calibration completed before delivery.
Developers do not need to purchase and assemble separate parts. A standard 9-pin wiring interface enables fast connection to the robot control system, greatly shortening dexterous hand development cycles, reducing overall wiring, and lowering signal interference and system failure rates.
Balanced Power
Equipped with a 12 V coreless brushless motor, the module delivers exceptional dynamic performance to fully meet all thumb working conditions. The motor’s no-load speed reaches 32000±10% RPM, and load speed 28000±10% RPM.
After 1:853 reduction (planetary reduction 1:128 + worm gear reduction 1:6.67), the module’s no-load speed is 35±10% RPM, load speed 30±10% RPM, and load torque ≥1 mNm, balancing no-load fast response and load high-torque output.
The combined planetary gear + worm gear transmission resolves the traditional conflict between transmission efficiency and reverse self-locking. The worm gear structure provides inherent reverse self-locking, stably maintaining grasping after power failure and effectively preventing object slippage.
Optimized gear profile and material selection boost maximum motor efficiency to 75%, significantly reducing overall power consumption and extending robot battery life.
High Precision
Precision-machined transmission components limit gearbox backlash to ≤1.5°, enabling accurate control of thumb motion angles to meet positioning demands for fine pinching and grasping.
High Shock Resistance
Core transmission components are made of high-strength wear-resistant materials, delivering excellent shock resistance to withstand instantaneous impact loads during grasping and adapt to long-term operation with frequent start-stop and forward-reverse switching.
The module operates reliably in a temperature range of -40°C to 85°C, adapting to diverse indoor and outdoor environments. An integrated temperature control unit monitors motor operating temperature in real time to prevent overload overheating damage and ensure long-term stable performance.
Standardized Interface
The module uses standardized mechanical mounting dimensions and electrical wiring definitions, directly compatible with mainstream dexterous hand thumb joint designs without major mechanical modifications. The clear wiring sequence defines Hall A/B/Z signals, power supply, motor three-phase wires, temperature control, and other interfaces, supporting mainstream robot control systems and greatly reducing developer adaptation difficulty.
Overview of the PG16K128-KW1618+LG04M20Z Thumb Grasping Module
The PG16K128-KW1618+LG04M20Z is a dedicated grasping motor module for robot dexterous hand thumbs, with gearbox backlash ≤1.5°. Core transmission parts use high-strength wear-resistant materials, and it comes standard with a 9-pin interface for fast adaptation to various robot control systems. Its performance fully covers all thumb grasping working conditions.
Customization Services and Technical Support System
As a professional micro motor R&D and manufacturer, we provide a complete global customization service and technical support system. We offer one-stop services from solution design, product development to mass production, covering the full development cycle of dexterous hand products.
Our customization services include:
- Custom motor winding parameters to adapt to different operating voltages (6 V, 24 V, etc.) and speed-torque requirements;
- Adjustable reducer ratios to optimize torque-speed matching for grasping conditions;
- Custom sensor types and resolutions to meet different encoder precision and high-precision closed-loop control needs;
- Custom electrical interfaces, wiring definitions, and communication protocols compatible with various robot control systems;
- Custom output shaft forms and mounting flange sizes to fit different dexterous hand mechanical structures;
- Special protection rating and environmental adaptability designs for extreme conditions in medical, industrial, and other special scenarios.
We also have a technical support team of senior motor and robot application engineers, providing global customers with end-to-end support from solution design, product selection to debugging and maintenance. We help customers efficiently solve development challenges, greatly shorten product development cycles, and accelerate market deployment.
Industry Trends and Future Outlook
The humanoid robot and collaborative robot industries are at a critical stage of rapid growth, set to boom in the coming years. With advancing technology and falling costs, dexterous hands with human-like manipulation capabilities will be widely used in industrial precision assembly, commercial services, medical rehabilitation, home services, and other fields, becoming a core growth segment of the robot industry.
Future development trends of robot dexterous hand drive systems will focus on four areas:
- Universality and modularization: Universal drive modules with standardized mechanical and electrical interfaces will become mainstream, enabling interoperability between products from different manufacturers and lowering industry development barriers.
- Higher integration: Further integration of motors, reducers, drivers, encoders, and force sensors to shrink volume, reduce weight, and improve palm space utilization.
- Cost reduction: Continuous cost reduction through technological innovation and economies of scale, driving dexterous hands from laboratory R&D to large-scale mass production.
- Intelligence: Integration of more intelligent sensors and control algorithms to achieve force-position hybrid control, self-diagnosis, self-calibration, and adaptive control of the power system, enhancing the intelligent manipulation of dexterous hands.
We will continue to focus on micro geared motor and precision transmission technologies, constantly optimizing product performance and launching more drive solutions tailored to the global dexterous hand market. We believe that through close cooperation with developers and manufacturers worldwide, we will jointly drive innovation and growth in the robot dexterous hand industry and support the large-scale popularization of humanoid robots.
Conclusion
The PG16K128-KW1618+LG04M20Z thumb grasping motor module precisely targets common industry pain points in robot dexterous hand thumb drive development. Built on brushless coreless motor technology, it delivers a highly integrated, high-torque-density, cost-effective, and customizable integrated drive solution, offering a new universal thumb drive option for global robot developers.
Its ultra-compact 16 mm miniaturized design, optimized planetary + worm gear transmission, reverse self-locking, and low-backlash high-precision performance fully meet the thumb drive needs of dexterous hands in humanoid robots, collaborative robots, medical rehabilitation robots, precision assembly robots, and other fields.
Combined with our comprehensive customization services and professional technical support, the PG16K128-KW1618+LG04M20Z thumb grasping motor module is set to become the preferred solution for robot dexterous hand thumb drives, accelerating the deployment and popularization of more dexterous hand products and driving the humanoid robot industry into a new era of large-scale development.
FAQS
Q1:What are the primary applications for this motor module?
A1:It is specifically designed for the thumbs of humanoid robotic hands, collaborative robots, medical rehabilitation devices, and precision industrial grippers.
Q2:Does the module support holding objects without power?
A2:Yes. The integrated worm gear structure provides a reverse self-locking function, ensuring the thumb maintains its grip even if power is disconnected.
Q3:Is the motor compatible with standard robot control systems?
A3:Absolutely. It features a standardized 9-pin interface and provides Hall A/B/Z signals, making it plug-and-play with most mainstream robotic controllers.