Book Categories:

As the humanoid robot industry moves rapidly toward commercialization, high-end dexterous hands—capable of human-like fine manipulation—have become core components for breakthroughs in industrial precision assembly, medical rehabilitation, and commercial services.
The PG10K28-KW1016+LG13175K20 is an integrated drive-control coreless module specifically developed for the finger joints of high-end robotic hands. It innovatively integrates a 10mm coreless brushless motor, dual-stage precision gearbox, high-precision position encoder, and servo drive unit within a single coaxial housing.
This module solves the industry pain points of balancing integration, precision, cost, and coordination, providing a cost-effective, closed-loop, and easy-to-deploy “all-in-one” solution for the mass production of high-end dexterous hands.
Table of Contents
Key Takeaways
- The 10mm ultra-slim profile allows the actuator to be placed directly at the finger joint, mimicking human muscle-tendon anatomy.
- A single 4-wire serial bus replaces the “cable nest,” significantly increasing the system’s Mean Time Between Failures (MTBF).
- The integrated worm gear provides a natural “self-locking” feature, ensuring the hand maintains its grip during a power loss without needing extra brakes.
- Transition from raw components to a functioning 6-axis dexterous hand prototype in 1–2 weeks using our plug-and-play GUI tuning tools.
- Native position-speed-torque control allows for seamless switching between high-force gripping and delicate tactile interaction.
- The coreless rotor minimizes rotational inertia, allowing fingers to execute high-frequency gestures and complex reflex actions without lag.
- Built with high-strength alloy steel and a fully sealed housing, the module is designed for the rigorous duty cycles of industrial assembly and medical rehab.
Core Working Principle of Humanoid Robotic Dexterous Hands
A robotic dexterous hand is a bionic replication of the human hand’s structure and motion logic, a complex actuation system integrating mechanical design, power transmission, servo control, and environmental perception.
The human hand features 27 bones, more than 20 joints, and dozens of muscles and tendons, capable of performing tens of thousands of fine movements. Robotic dexterous hands are designed based on this bionic logic.
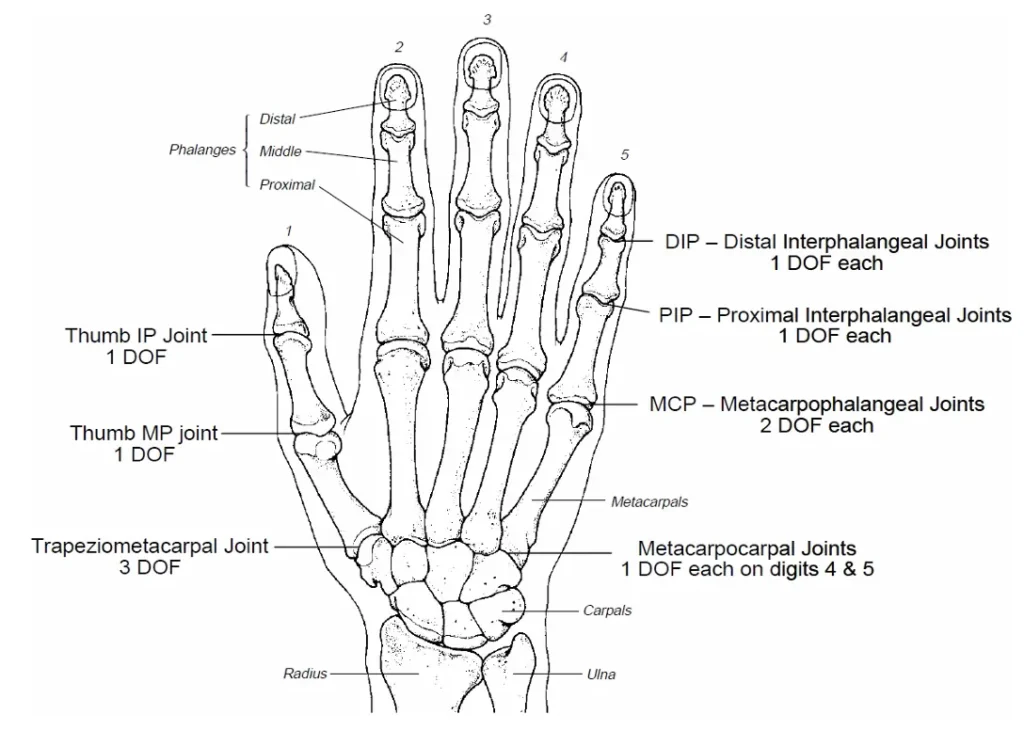
A typical humanoid dexterous hand adopts a bionic skeletal structure of palm base + multi‑DOF finger joints. A single finger generally has 3–4 rotational DOFs corresponding to flexion/extension of the metacarpophalangeal (MCP), proximal interphalangeal (PIP), and distal interphalangeal (DIP) joints, plus adduction/abduction DOFs. The total DOFs of one dexterous hand usually range from 18 to 25.
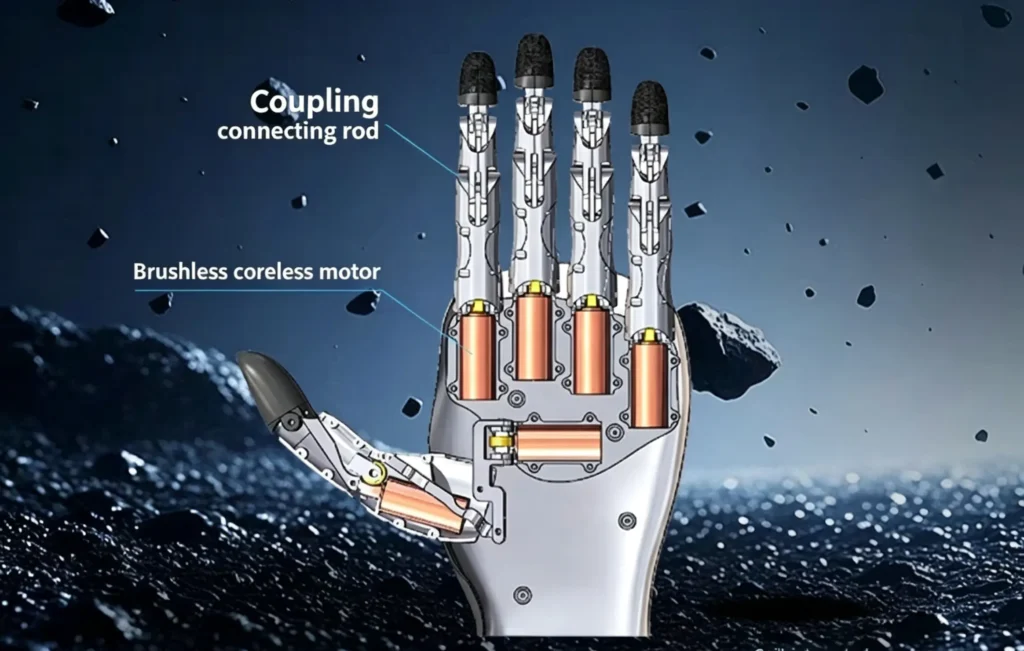
Motion execution in the dexterous hand relies on drive modules actuating transmission structures such as linkages and tendons (bionic tendons), converting rotational motion of the drive unit into fixed‑axis swinging of finger joints to achieve basic movements: extension, flexion, adduction, and abduction.
All drive modules must fit into the tight spaces of the palm or finger joints, imposing extreme requirements on the drive unit’s size, coaxiality, and light weight—key limitations that traditional split drive designs cannot overcome.
Every human hand movement requires coordinated action across multiple fingers and joints. Human‑like motion of a robotic dexterous hand depends on multi‑axis synchronous cooperative control.
The 6–12 drive joints of one dexterous hand are networked in series via a unified communication bus. The main control system sends synchronous motion commands to all joint modules over the bus simultaneously, and all modules receive and execute commands in sync.
Motion synchronization error must be controlled at the millisecond level to ensure smooth, natural human‑like movement and avoid jitter, desynchronization, or misalignment. Bus communication also drastically reduces internal wiring, simplifying cabling and lowering system failure rates—an essential direction for high‑end dexterous hand drive systems.
How the Integrated Drive‑Control Coreless Cup Module Powers Dexterous Hands
The PG10K28‑KW1016+LG13175K20 module packs a high‑performance coreless brushless motor, 1:560 two‑stage precision reducer, high‑precision position encoder, and servo drive unit into a 10‑mm outer‑diameter coaxial housing with no external drive components, completely redefining the dexterous hand drive architecture.
In practical dexterous hand applications, the module connects to the robot main control system via only a 4‑wire serial bus, perfectly matching the bus‑based cooperative control principle.
Developers use simple RXD/TXD serial commands to achieve full closed‑loop precision control of position, speed, and torque, eliminating tedious work such as drive matching, encoder tuning, and complex wiring. Development cycles are shortened to 1–2 weeks.
In a standard power layout for mainstream high‑end dexterous hands, one hand uses 6 identical modules for full finger actuation, forming a mature standardized solution:
- The thumb, as the key opposing joint, uses 2 modules to separately drive flexion/extension and adduction/abduction of the metacarpophalangeal joint, enabling precise control of extension, retraction, and rotation for fine opposing grasping.
- The index, middle, ring, and little fingers each use 1 module to independently drive coordinated multi‑joint flexion/extension.
All 6 modules communicate in series over the 4‑wire bus. The main control system issues synchronized commands to all modules at once, with motion synchronization error held to milliseconds, enabling precise multi‑finger coordination for smooth, natural human‑like operation.
Core Requirements for High‑End Robotic Dexterous Hand Drive Systems
Based on the core working principles above, high‑end dexterous hands impose far stricter demands on drive systems than ordinary actuators, and existing industry solutions fail to fully meet these needs.
Ultra‑high integration
Installation space inside the palm and finger joints is extremely limited. One dexterous hand needs 6–12 drive units. Traditional split designs require external driver boards and cannot fit inside the palm, a major bottleneck for miniaturization.
Full closed‑loop high‑precision control
High‑end tasks—fragile object grasping, microcomponent assembly, minimally invasive surgery—demand position‑speed‑torque triple closed‑loop control. Open‑loop modules lack position feedback, causing step loss and force instability, making them unsuitable for fine manipulation.
Minimal wiring & high reliability
Traditional split drives need 10+ wires per axis; 6 axes require 100+ wires. This creates severe cabling challenges, signal interference, poor contact, short circuits, and very low system reliability.
Multi‑joint synchronous cooperation
Human‑like motion requires millisecond‑level synchronization across multiple fingers and joints. Traditional split drives control each unit independently, making synchronized command broadcasting difficult, leading to jitter and uncoordinated movement.
Small size, high torque & self‑locking
Within 10‑mm space, modules need fast response and sufficient gripping torque, plus built‑in reverse self‑locking to maintain posture after power loss for safety, no extra brake mechanism needed.
Low development threshold & mass‑production suitability
Humanoid robots have strict battery life requirements, so drives need high energy efficiency. They must also be cost‑effective to break global high‑end price monopolies, with mature tools to lower tuning barriers and support scaled production.
Comparison of Mainstream Drive Solutions & Core Limitations
The PG10K28‑KW1016+LG13175K20 module uses an innovative encoder + driver built‑in integrated design, breaking the industry deadlock between small size and full integration, and fully matching the core principles and application needs of high‑end dexterous hands.
| Comparison Item | Traditional Split Coreless Drive | Imported High‑End Integrated Micro Servo | Standard Open‑Loop Coreless Gear Module | This Integrated Drive‑Control Coreless Cup Module |
| Core Integration | Very low; requires external driver & encoder | High; drive‑control integrated | Medium; motor + reducer only | Ultra‑high; encoder + driver built‑in; full integration of motor, reduction, sensing, control |
| Fits 10‑mm Joint Space | No; external driver occupies extra space | Yes; high customization barrier | Yes | Perfect fit; full integration within 10‑mm OD, no extra parts |
| Control Mode | Semi‑open/semi‑closed loop; relies on external parts | Full closed‑loop (3‑loop) | Open loop; no position feedback | Full closed‑loop position‑speed‑torque control; real‑time encoder feedback |
| System Wiring | 10+ wires/axis; 100+ for 6 axes | 4–6 wires/axis | 8+ wires/axis | Only 4 wires/axis; supports multi‑axis serial bus communication |
| Multi‑Axis Synchronization | Poor; independent control hard to sync | Excellent; supports bus sync | Poor; open loop no sync | Excellent; native bus sync command; millisecond‑level error |
| Development Difficulty | Extremely high; in‑house drive & tuning required | Medium‑high; high adaptation barrier | Medium; external drive & tuning needed | Ultra‑low; complete driver & GUI host computer; plug‑and‑play |
| Development Cycle | 3–6 months; self‑matching & tuning | 1–2 months; high adaptation barrier | 1–2 months; external drive needed | 1–2 weeks; one‑click GUI tuning |
| Unit Production Cost | Medium‑high; includes drive & encoder | Extremely high (over ¥1,000/unit) | Low | Medium‑high; far lower than imports; fully integrated high value |
| After‑Sales Maintenance | High; many failure points in wiring & drives | Extremely high; fully sealed non‑disassemblable | Medium; external drive maintenance | Ultra‑low; fully integrated maintenance‑free; online firmware upgrade |
Advantages of the PG10K28‑KW1016+LG13175K20 Integrated Module
Engineered for the core principles and exclusive operating conditions of high‑end dexterous hands, this module is comprehensively optimized to eliminate pain points of traditional designs.
Fully Integrated Drive‑Control Design
Industry‑leading coaxial integration packs a coreless brushless motor, two‑stage precision reducer, high‑precision encoder, and servo drive into a 10‑mm outer diameter with no external components. It fits directly into tight finger joints and front palm spaces.
Saves over 80% drive installation space vs. split designs, solving the industry bottleneck of fitting multiple drive boards inside the palm. Lightweight integration lowers finger motion inertia and boosts dynamic response for multi‑finger movements, perfectly matching bionic kinematics.
Closed‑Loop Control
Built‑in high‑precision encoder and native servo drive enable position‑speed‑torque triple closed‑loop control, eliminating step loss, low precision, and unstable force in open‑loop modules.
Finger joint angle error is minimized. Gripping force is precisely adjustable for both high‑force stable holding and gentle, non‑damaging grasping of fragile items and microcomponents—ideal for precision assembly, medical rehabilitation, and commercial services.
4‑Wire Serial Bus
Standard 4‑wire serial design uses only VDD, GND, RXD, TXD for full control, supporting multi‑module serial bus wiring for multi‑joint coordination.
One dexterous hand with 6 drive units needs only one 4‑wire bus, reducing wiring by over 90% vs. split systems. This eliminates messy internal cabling, interference, loose connections, and short circuits, drastically lowering failure rates and simplifying assembly for higher production efficiency.
Complete driver software and a graphical user interface (GUI) host computer are included. Developers skip low‑level drive coding; configure parameters, tune motion, monitor status, and upgrade firmware via the GUI for true plug‑and‑play operation.
Two‑Stage Transmission
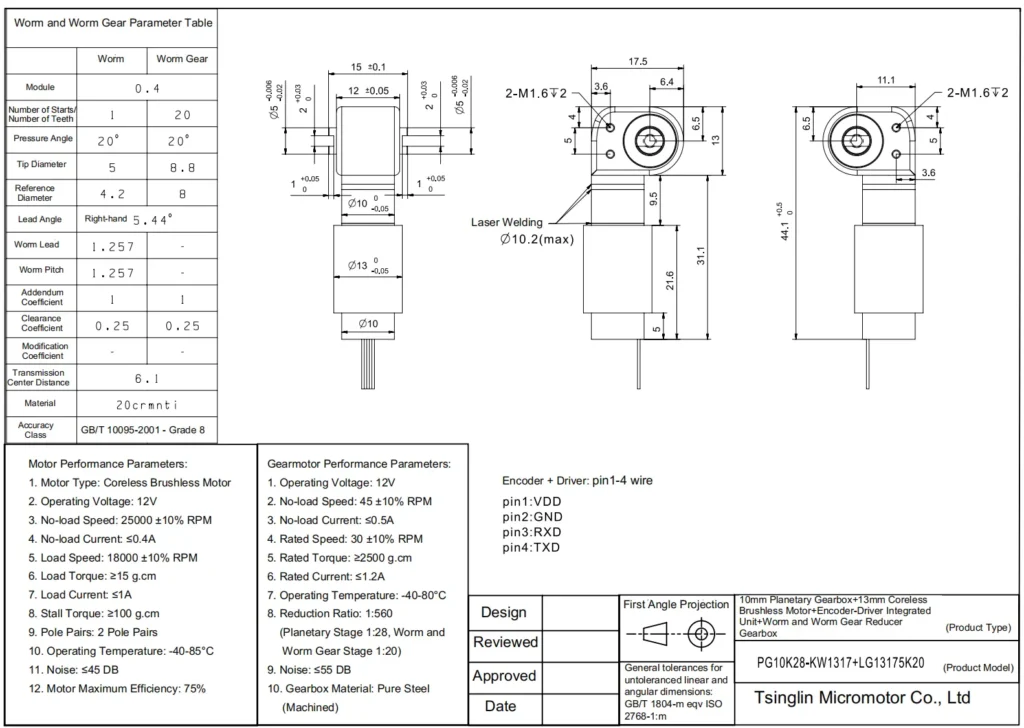
Two‑stage design: planetary gear + worm gear with a total ratio of 1:560 (planetary 1:28, worm 1:20), perfectly matching dexterous hand power transmission and torque amplification.
At 12 V nominal voltage:
- Motor no‑load speed: 32,000±10% RPM
- Module no‑load speed after reduction: 55±10% RPM
- Rated torque: ≥800 g·cm
Balances fast no‑load response and stable loaded gripping. The worm gear provides natural reverse self‑locking: holds posture after power loss to prevent dropped objects, no extra brake needed, saving space and enhancing safety.
Host Computer Tuning
Built‑in servo firmware natively supports multi‑module bus synchronous commands. The main control system sends instructions to all joints at once over the 4‑wire serial bus, with millisecond‑level synchronization error, eliminating desync and jitter in split systems.
Supports smooth, natural human‑like control for both single‑finger fine adjustment and multi‑finger complex grasping, greatly improving dexterous hand performance and versatility.
The GUI host computer enables one‑time synchronous motion programming, batch parameter setup, and real‑time motion monitoring for all series modules—no complex coding required—speeding up multi‑finger coordination development and deployment.
Low Power Consumption
Optimized magnetic circuit and ironless rotor structure yield:
- Motor no‑load current: ≤0.15 A
- Module no‑load current: ≤0.2 A
- Motor peak efficiency: up to 75%
Far higher energy efficiency than traditional designs, reducing overall power consumption and extending humanoid robot battery life.
Key transmission parts use 20CrMnTi alloy steel; gearboxes are fully steel machined. Operating temperature: −40°C to 85°C. Running noise: ≤55 dB. Stable under high‑frequency start/stop and forward/reverse cycles. Fully sealed and maintenance‑free, lowering long‑term costs for mass‑produced products.
Overview of PG10K28‑KW1016+LG13175K20
The PG10K28‑KW1016+LG13175K20 is a fully integrated drive‑control coreless cup module built exclusively for dexterous hands. It features a coaxial structure: 10‑mm planetary gearbox + 10‑mm coreless brushless motor + integrated encoder‑drive unit + worm gear reducer. Standard 4‑wire serial communication port, complete driver software, and GUI host computer included.
Customization & Technical Support
As a professional developer and manufacturer of miniature motors and integrated drive‑control systems, we offer a full global customization and support ecosystem. We provide one‑stop services from design and development to mass production covering the entire lifecycle of high‑end dexterous hands.
Our customization covers:
- Motor winding parameters for various voltages, speeds, and torques
- Reducer ratio adjustment to optimize speed‑torque matching
- Encoder resolution and type for different closed‑loop precision needs
- Drive firmware and communication protocol customization to match robot controllers and domestic bus standards
- Output shaft and mounting flange dimensions for various joint designs
- Special ingress protection and environmental hardening for medical, cleanroom, and extreme conditions
We also provide deep driver customization and GUI software adaptation for seamless integration with your control system, further reducing development difficulty.
A dedicated team of motor, servo drive, and robotics application engineers offers full‑cycle support: concept, selection, tuning, and maintenance. We deliver tailored solutions for force‑position hybrid control and multi‑joint synchronization, helping you solve challenges, shorten cycles, and accelerate time to market.
Industry Trends & Future Outlook
The humanoid robot industry is at a pivotal shift from lab R&D to large‑scale commercialization. As the core end‑effector for physical interaction, high‑end dexterous hands will see explosive market growth. In the coming years, dexterous hand drive systems will evolve along four key trends:
- Full drive‑control integration: Single‑joint modules integrating power, transmission, sensing, and control will replace split designs as the industry standard, maximizing space efficiency and reducing system complexity.
- Bus‑based control: Multi‑axis serial bus communication will become standard for precise synchronous control, simplifying wiring and improving reliability.
- Tool‑based development: Mature drivers and graphical tuning tools will be standard, lowering barriers and accelerating adoption.
- Cost reduction: Cost‑effective domestic integrated drive‑control modules will break high‑end price monopolies, moving high‑end dexterous hands from custom builds to mass production.
We will continue to advance miniature coreless motor, precision transmission, and servo drive‑control technologies, optimize performance, enhance tools and services, and launch more solutions for the global high‑end dexterous hand market.
By partnering with developers and manufacturers worldwide, we will drive innovation in the dexterous hand industry and accelerate the scaled commercial adoption of humanoid robots.
Conclusion
The PG10K28‑KW1016+LG13175K20 integrated drive‑control coreless cup module is engineered entirely around the core principles of humanoid dexterous hands and directly addresses industry‑wide pain points in high‑end dexterous hand drive systems.
With 10‑mm fully integrated design, full closed‑loop precision, minimal bus wiring, multi‑axis synchronization, and small‑size high torque, plus mature drivers and a GUI tuning tool, it provides global robotics developers with a low‑threshold, high‑performance, cost‑effective integrated drive solution for high‑end dexterous hands.
Backed by complete customization and professional technical support, this module is set to become the preferred standardized choice for high‑end dexterous hand drives, enabling rapid deployment of more dexterous hand products and ushering the humanoid robot industry into a new era of scaled commercialization.
FAQ
Q1:How does the module handle heat dissipation when multiple units are packed tightly in a small palm?
A1:The module utilizes a high-efficiency coreless rotor with a no-load current of ≤ 0.15A, significantly reducing heat generation at the source. Additionally, the integrated aluminum alloy housing acts as a structural heat sink. For dense multi-axis configurations, we recommend conductive cooling through the palm’s metal frame.
Q2:Is the current loop feedback accurate enough for delicate “pinching” or force-sensitive tasks?
A2:Absolutely. The built-in drive unit supports high-frequency current sampling. Combined with the 1:560 reduction ratio, even minute output torque fluctuations are translated into controllable motor current changes. This enables millisecond-level force response, ideal for handling fragile objects like eggshells or thin electronic components.
Q3:How easily can this module be integrated into an existing robot control architecture?
A3:The module supports standard TTL asynchronous serial communication and comes with a comprehensive SDK and GUI. Users only need to send simple Hex commands (e.g., target position, speed, or current limit). There is no need to manage complex underlying logic like PWM modulation or encoder decoding.