Book Categories:

The core capability of anthropomorphic robotic dexterous hands relies not only on the opposable motion of the thumb but also on the coordinated movement of the index, middle, ring, and little fingers.
These four fingers perform over 80% of the dexterous hand’s motion tasks, serving as the core actuators for precision pinching, multi‑posture grasping, curved‑surface fitting, and micro‑operation control. The performance of their drive modules directly determines the operational upper limit and mass‑production feasibility of the dexterous hand.
The PG10K28‑KW1016+LG04M17Z micro drive module perfectly resolves existing industry pain points and provides a standardized drive solution with high consistency and cost‑effectiveness for the large‑scale mass production of dexterous hands.
Table of Contents
Key Takeaways
- This module is designed for multi‑finger joints of robotic dexterous hands.
- It features a 10 mm coaxial miniaturized structure for built‑in joint installation.
- Brushless coreless motor ensures low ripple and long service life.
- Two‑stage transmission provides high torque and inherent reverse self‑locking.
- Extremely low backlash supports precision force control and smooth operation.
- High consistency avoids asynchronous movement in batch applications.
- It offers a standardized solution for mass production of dexterous hands.
Drive Architecture of Multi‑Finger Joints in Dexterous Hands
For the index, middle, ring, and little fingers of a general anthropomorphic dexterous hand, a single finger typically has 3–4 rotational degrees of freedom (DOFs), corresponding to metacarpophalangeal joint flexion/extension, proximal interphalangeal joint flexion/extension, and distal interphalangeal joint flexion/extension. High‑end dexterous hands are additionally equipped with adduction/abduction DOFs.
All drive units must be compactly installed inside the finger joints or the front palm, with the available mounting diameter strictly limited to the 10 mm class.
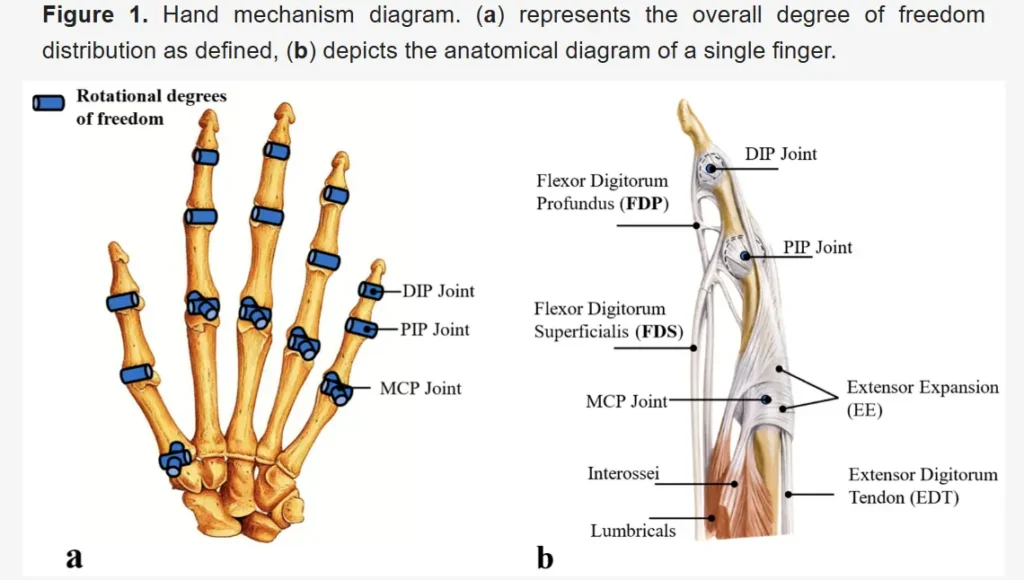
This joint‑built‑in drive architecture minimizes the finger’s motion inertia and enhances the dynamic response and operational flexibility of multi‑finger coordination. It also requires the drive module to adopt an ultra‑compact coaxial design, enabling direct embedded installation in joints without additional transmission structures.
Compared with the high‑load core opposable function of the thumb, the other four fingers focus more on high‑frequency coordination, precision control, and long‑term stable grasping.
These four fingers cooperate with the thumb to perform continuous flexion/extension, posture fine‑tuning, and grasping fitting. Their motion start/stop and forward/reverse switching frequencies are much higher than those of the thumb joint, imposing extremely high requirements on the acceleration/deceleration response speed and motion tracking performance of the drive module.
When grasping fragile objects, tiny components, or curved‑surface objects, the four fingers need precise force‑controlled fitting to avoid damaging workpieces or slipping. This demands strict control over the drive module’s transmission backlash, torque ripple, and smoothness at low speeds.
During object grasping, the four fingers must maintain the holding posture for long periods, requiring the drive module to have reliable reverse self‑locking capability. It should retain the clamping state even when powered off to prevent objects from falling, while reducing static standby power consumption and extending the overall battery life.
A single dexterous hand uses multiple identical drive modules in batches, which must maintain high consistency in core performance such as speed, torque, and backlash. They must also operate stably for long periods without maintenance under high‑frequency start/stop conditions, reducing the overall failure rate and later maintenance costs.
Drive Architecture of Multi‑Finger Joints in Dexterous Hands
For the index, middle, ring, and little fingers of a general anthropomorphic dexterous hand, a single finger typically has 3–4 rotational degrees of freedom (DOFs), corresponding to metacarpophalangeal joint flexion/extension, proximal interphalangeal joint flexion/extension, and distal interphalangeal joint flexion/extension. High‑end dexterous hands are additionally equipped with adduction/abduction DOFs.
All drive units must be compactly installed inside the finger joints or the front palm, with the available mounting diameter strictly limited to the 10 mm class.

This joint‑built‑in drive architecture minimizes the finger’s motion inertia and enhances the dynamic response and operational flexibility of multi‑finger coordination. It also requires the drive module to adopt an ultra‑compact coaxial design, enabling direct embedded installation in joints without additional transmission structures.
Compared with the high‑load core opposable function of the thumb, the other four fingers focus more on high‑frequency coordination, precision control, and long‑term stable grasping.
These four fingers cooperate with the thumb to perform continuous flexion/extension, posture fine‑tuning, and grasping fitting. Their motion start/stop and forward/reverse switching frequencies are much higher than those of the thumb joint, imposing extremely high requirements on the acceleration/deceleration response speed and motion tracking performance of the drive module.
When grasping fragile objects, tiny components, or curved‑surface objects, the four fingers need precise force‑controlled fitting to avoid damaging workpieces or slipping. This demands strict control over the drive module’s transmission backlash, torque ripple, and smoothness at low speeds.
During object grasping, the four fingers must maintain the holding posture for long periods, requiring the drive module to have reliable reverse self‑locking capability. It should retain the clamping state even when powered off to prevent objects from falling, while reducing static standby power consumption and extending the overall battery life.
A single dexterous hand uses multiple identical drive modules in batches, which must maintain high consistency in core performance such as speed, torque, and backlash. They must also operate stably for long periods without maintenance under high‑frequency start/stop conditions, reducing the overall failure rate and later maintenance costs.
Specific Application Logic of Motors in Dexterous Hands
The dexterous hand is the core actuator for robots to achieve physical interaction and precision manipulation. Its core drive system mainly consists of a coreless motor, precision planetary reducer, transmission mechanism (worm gear, tendon, ball screw), position sensor, and force encoder.
Among them, the coreless motor and its matching reducer are the core units determining finger motion capability, acting as the power heart for the dexterous hand to achieve human‑like motions.
In actual operation, all finger motions are powered by the coreless motor: upon receiving control commands, the coreless motor rotates forward or reverse precisely via forward/reverse power supply. The high‑speed rotational power is first amplified through a high‑reduction‑ratio precision planetary reducer.
Then, through transmission structures such as worm gears, hinges, and tendons, the motor’s rotational motion is converted into linear flexion/extension and flipping motions of the finger joints, ultimately enabling full‑dimensional operations such as finger closing, opening, and posture fine‑tuning.
Precise closed‑loop control of the motor’s input voltage and current allows real‑time adjustment of the finger’s output torque and motion angle, supporting both high‑force stable grasping and micron‑level precision pinching.
In the standard configuration of a general anthropomorphic dexterous hand, a single dexterous hand is usually driven by 6 coreless motor modules to form a mature standardized power layout.
As the core opposable joint, the thumb is equipped with 2 high‑torque coreless motor modules, which independently drive the metacarpophalangeal joint’s flexion/extension and adduction/abduction motions to achieve the core opposable grasping function. This position is perfectly compatible with the PG16K128‑KW1618+LG04M20Z thumb‑dedicated grasping motor module.
For the index, middle, ring, and little fingers (excluding the thumb), each finger corresponds to 1 miniaturized coreless motor module that independently drives coordinated flexion/extension motions. Four modules cooperate with worm gear and tendon transmission to enable synchronous/independent control of the four fingers. This position is the core application scenario of the PG10K28‑KW1016+LG04M17Z micro drive module.
The coordinated operation of 6 coreless motor modules, under unified control system scheduling, enables human‑like flexible manipulation and sub‑millimeter precision control of the dexterous hand, fulfilling full‑scene tasks from heavy‑load handling to micro‑component assembly.
Core Requirements for Drive Motors in Multi‑Finger Joints of Dexterous Hands
Based on the above joint drive architecture, core application logic of coreless motors, and operating characteristics, the four non‑thumb fingers of a dexterous hand impose six core requirements on their drive modules:
- Ultra‑miniaturization and lightweight: The outer diameter of the drive module must strictly fit the 10 mm‑class joint installation space, with extremely low weight to avoid increasing finger motion inertia and impairing the dynamic response of multi‑finger coordination.
- High performance consistency: Multiple modules are used in batches per dexterous hand, requiring full‑parameter calibration and matching before delivery to ensure high consistency in speed, torque, backlash, and other core performance, preventing asynchronous multi‑finger motions.
- Low backlash and high running smoothness: Precision operations demand minimal gearbox backlash, as well as extremely low torque ripple, jitter‑free and creep‑free low‑speed operation to meet precise force‑controlled fitting of multi‑fingers.
- Reliable reverse self‑locking: Natural reverse self‑locking is required to stably maintain the clamping posture when powered off, ensuring grasping safety, reducing static power consumption, and extending robot battery life.
- Long service life and high reliability: Stable long‑term operation under high‑frequency start/stop and forward/reverse switching, with no wearing parts and maintenance‑free, suitable for long‑term use in mass‑produced products.
- Standardized and universal design: Standardized mechanical and electrical interfaces compatible with all joints of the index, middle, ring, and little fingers, greatly reducing developer selection, inventory, and maintenance costs.
Why Choose the 10 mm Brushless Coreless Module
Aiming at the exclusive operating requirements of multi‑finger joints in dexterous hands, we horizontally compare this 10 mm brushless coreless module with three mainstream industry drive solutions to clearly demonstrate its core advantages and why it is the optimal choice for multi‑finger driving in dexterous hands.
Pain Points of Micro Stepper Motor Modules
Micro stepper motor modules are commonly used in some prototype development, but their inherent performance defects make them completely unsuitable for mass production and practical application of multi‑finger joints in dexterous hands.
Stepper motors achieve angle control via pulse signals. Although open‑loop control is simple, obvious jitter and resonance occur at low speeds, failing to meet the smoothness requirements for multi‑finger precision force control.
Meanwhile, stepper motors have high power consumption and low energy efficiency, severely draining the system power during long‑term holding. They lack reverse self‑locking, leading to easy clamping loosening when powered off.
More critically, stepper motors with the same torque rating generally have an outer diameter exceeding 14 mm, incompatible with the 10 mm‑class finger joint installation space. Batch use causes accumulation of step‑angle errors, resulting in asynchronous multi‑finger motions.
Pain Points of Micro Brushed Coreless Gear Motors
Micro brushed coreless gear motors offer certain miniaturization advantages, but their structural defects make them unsuitable for long‑term mass production of multi‑finger joints in dexterous hands.
Brushed coreless motors retain carbon brushes and mechanical commutators. Under high‑frequency start/stop of multi‑fingers, carbon brushes wear continuously, resulting in short service life. Batch use in a single dexterous hand easily causes premature failure of individual modules, leading to extremely high later maintenance costs.
Additionally, mechanical commutation generates continuous electric sparks and electromagnetic interference, directly impairing the signal accuracy of tactile and force sensors at the finger tips and disabling the dexterous hand’s core sensing capability. Assembly errors of carbon brushes and commutators during mass production lead to poor product performance consistency and frequent asynchronous multi‑finger motions.
Comparison with Micro Digital Servos
Micro digital servos are widely used by small and medium developers for prototyping, but their structural and performance design is inherently incompatible with practical multi‑finger joints in dexterous hands.
Most micro servos adopt a non‑coaxial flat square structure, incompatible with the 10 mm‑class circular coaxial installation space of finger joints. Additional linkage transmission structures are required, occupying the already limited finger space and increasing transmission backlash and motion inertia.
Core transmission gears are mostly made of engineering plastics, prone to wear and tooth stripping under high‑frequency motions, with short service life. Transmission backlash generally exceeds 3°, failing to meet multi‑finger precision operation requirements. Servos are fully sealed and non‑disassemblable, requiring full replacement upon failure, leading to extremely high maintenance costs in batch use for a single dexterous hand.
PG10K28-KW1016+LG04M17Z Micro Drive Modules in Robotic Dexterous Multi-Finger Joints
| Comparison Item | Micro Stepper Motor Module | Micro Brushed Coreless Motor | Micro Digital Servo | 10 mm Brushless Coreless Module (This Product) |
| Fits 10 mm coaxial space | No | Yes but short service life | Completely incompatible | Perfect fit |
| Transmission backlash | Medium (accumulated step error) | Medium | ≥3° | Extremely small, precisely controllable |
| Reverse self‑locking capability | No | No (available in TSL products) | No | Built‑in, self‑locking torque ≥2 N·m |
| Multi‑unit performance consistency | Poor | Poor | Medium | Extremely high, full‑parameter calibration before delivery |
| Running smoothness | Poor (low‑speed jitter/resonance) | Medium | Medium | Extremely high, jitter‑free and creep‑free |
| Service life | Medium | Short (carbon brush wear) | Short (plastic gear wear) | Extremely long, no mechanical wear |
| Electromagnetic interference | Medium | High (commutation sparks) | Low | Extremely low |
| Batch maintenance cost | Medium | High | High | Extremely low, maintenance‑free |
| Energy efficiency ratio | Low | Medium | Medium | High, max. efficiency 75% |
Engineering Advantages of the PG10K28‑KW1016+LG04M17Z Drive Module
Targeting the exclusive operating requirements of multi‑finger joints in dexterous hands, we have comprehensively optimized this 10 mm brushless coreless drive module to perfectly solve the core pain points of traditional solutions.
Miniaturization
The module features a 10 mm outer diameter coaxial structure, perfectly fitting the narrow 10 mm‑class installation space of the four finger joints. It can be directly embedded inside joints for direct drive without additional linkage or gear transmission structures, maximizing the use of limited internal finger space.
Its ultra‑lightweight design effectively reduces finger motion inertia, significantly improving the dynamic response and operational flexibility of multi‑finger coordination, fundamentally resolving the core contradiction of “volume and performance cannot be balanced” in traditional solutions.
Two‑Stage Transmission
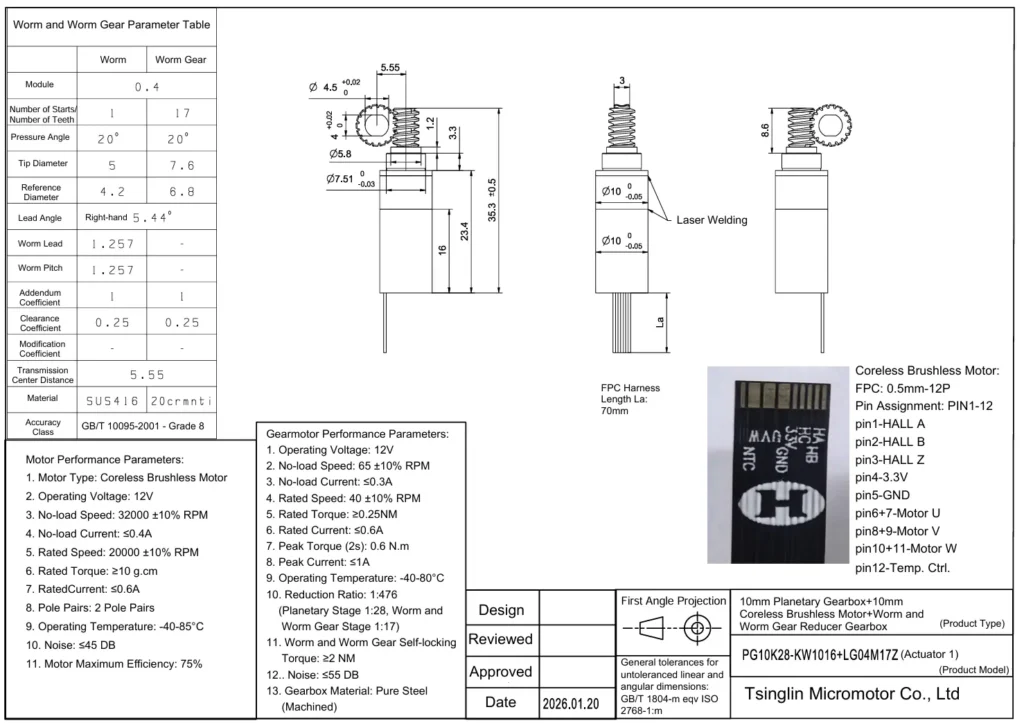
The module adopts a planetary reduction + worm gear two‑stage transmission design with a total reduction ratio of 1:476 (planetary stage 1:28, worm gear stage 1:17). At a rated operating voltage of 12 V, the motor’s no‑load speed is 32000±10% RPM; after reduction, the module’s no‑load speed is 65±10% RPM. The rated torque reaches 0.25 N·m, and the peak torque (2 s) reaches 0.6 N·m, perfectly balancing the dual requirements of fast no‑load finger motion and stable load grasping.
The worm gear structure provides inherent reverse self‑locking with a self‑locking torque ≥2 N·m, stably maintaining the finger clamping posture when powered off and effectively preventing grasped objects from slipping. No additional braking mechanism is needed, further saving installation space.
Optimized tooth profile design and all‑steel machined gearbox achieve an optimal balance between transmission efficiency and structural strength, fully adapting to high‑frequency multi‑finger motion conditions.
Brushless Coreless Motor
The module’s core uses a high‑performance coreless brushless motor with an ironless, slotless rotor design, completely eliminating cogging torque. Torque ripple during operation is extremely low, with no jitter or creep at low speeds. Paired with a Hall position sensor, it enables precise closed‑loop angle control, perfectly adapting to multi‑finger precision force control.
All products undergo full‑parameter calibration and performance matching before delivery, strictly controlling tolerances of speed, torque, current, and other core parameters. This ensures high performance consistency when multiple modules are used in batches per dexterous hand, completely eliminating asynchronous multi‑finger motions and greatly reducing developer debugging difficulty.
Integrated Integration
The module highly integrates a high‑performance coreless brushless motor, two‑stage precision reducer, Hall position sensor, and temperature control unit into a single housing with a 10 mm outer diameter. All components are matched and calibrated before delivery.
It is equipped with a standard 12‑Pin FPC flexible cable with 0.5 mm pitch, flexibly adapting to narrow internal finger wiring. Developers do not need to purchase and assemble separate components; they can quickly connect to the robot control system via standardized interfaces, greatly shortening the dexterous hand development cycle, reducing wiring steps, and lowering signal interference and system failure rates.
Low Noise
Core transmission components use high‑strength wear‑resistant materials: the worm shaft is SUS416 stainless steel, the worm wheel is 20CrMnTi alloy steel, and core gearbox gears are all‑steel machined, delivering excellent impact and wear resistance. They operate stably for long periods under high‑frequency start/stop and forward/reverse switching.
Optimized structure and tooth profile design limit the module’s overall operating noise to ≤55 dB and the motor body noise to ≤45 dB, perfectly adapting to quiet human‑robot collaboration scenarios.
The operating temperature range covers −40 °C to 85 °C. An integrated temperature control unit monitors the motor’s operating temperature in real time to prevent overheating damage under overload, ensuring long‑term stable operation in various scenarios.
Overview of PG10K28‑KW1016+LG04M17Z
The PG10K28‑KW1016+LG04M17Z is a micro drive module specially designed for non‑thumb multi‑finger joints of robotic dexterous hands. It adopts an integrated coaxial structure of a 10 mm planetary gearbox, 10 mm coreless brushless motor, and worm gear reducer.
Dimensions and Key Performance Parameters
Customization Services and Technical Support System
As a professional micro motor R&D and manufacturer, we provide a complete global customization service and technical support system. We offer one‑stop services from solution design, product development to mass production based on customers’ dexterous hand requirements, covering the full lifecycle of dexterous hand development.
Our customization services include:
- Custom motor winding parameters to adapt to different operating voltages and speed/torque requirements.
- Adjustable reducer ratios to optimize torque‑speed matching for finger operating conditions.
- Custom sensor types and resolutions for closed‑loop control of varying precision.
- Custom FPC cable length, pin definition, and communication protocols compatible with various robot control systems.
- Custom output shaft types and mounting flange sizes to fit different dexterous finger joint structures.
- Special protection rating and environmental adaptability design to meet extreme conditions in medical, industrial, and other special scenarios.
We also have a technical support team composed of senior motor engineers and robot application engineers, providing full‑process technical support from solution design, product selection to debugging and maintenance for global customers. We offer professional adaptation schemes for multi‑finger coordination control of dexterous hands, helping customers efficiently solve various development problems, greatly shortening product development cycles, and improving product launch efficiency.
Industry Development Trends and Future Outlook
Currently, the humanoid robot and collaborative robot industries are in a critical period of rapid growth. Dexterous hands with human‑like precision manipulation have become core components for robots to break through commercialization bottlenecks.
In the coming years, with booming demand in industrial precision assembly, commercial services, medical rehabilitation, home services, and other scenarios, dexterous hands will transition from laboratory prototypes to large‑scale mass production. Standardized, miniaturized, and high‑consistency multi‑finger drive modules will become the cornerstone of industry development.
The future development trends of drive systems for robotic dexterous hands will focus on four directions:
- Universality and standardization: Standardized drive modules compatible with all finger joints will become mainstream, greatly reducing industry development and inventory costs via unified mechanical and electrical interfaces.
- Ultra‑miniaturization and integration: Further integration of motors, reducers, sensors, and drive units to continuously shrink size for more compact finger joint designs.
- Low cost and high consistency: Low‑cost mass production via technological innovation and scale effects, while ensuring high performance consistency of batch products to promote large‑scale popularization of dexterous hands.
- Intelligent force‑control integration: Deep integration of drive modules with force and tactile sensors to achieve integrated drive and sensing, enhancing the intelligent manipulation level of dexterous hands.
We will continue to focus on micro gear motor and precision transmission technologies, continuously optimize product performance, and launch more drive solutions meeting global dexterous hand market demands.
We believe that through close cooperation with global developers and manufacturers, we will jointly promote innovation and development in the robotic dexterous hand industry and facilitate the large‑scale popularization of the humanoid robot industry.
Conclusion
The PG10K28‑KW1016+LG04M17Z micro drive module precisely targets common industry pain points in multi‑finger joint drive development of current robotic dexterous hands. With an ultra‑compact 10 mm design, high‑consistency brushless coreless core, two‑stage transmission self‑locking structure, and highly integrated design, it provides a new universal multi‑finger drive solution for global robot developers.
It perfectly fits the narrow installation space and complex operating requirements of the index, middle, ring, and little fingers of dexterous hands, and can be adapted to thumb joints as needed. It features excellent performance consistency, running smoothness, and long‑term reliability, fully meeting the full‑finger drive requirements of dexterous hands in humanoid robots, collaborative robots, medical rehabilitation robots, precision assembly robots, and other fields.
Combined with our complete customization services and professional technical support system, this product will become the preferred standardized solution for multi‑finger driving of robotic dexterous hands, helping more dexterous hand products quickly launch and popularize, and driving the humanoid robot industry into a new era of large‑scale development.
FAQ
Q1:What is PG10K28‑KW1016+LG04M17Z mainly used for?
A1:It is a 10mm micro drive module designed for index, middle, ring, and little fingers of robotic dexterous hands, supporting high‑precision, high‑frequency multi‑finger coordination.
Q2:What is the noise level?
A2:Module noise ≤55dB; Motor body noise ≤45dB, suitable for quiet human‑robot collaboration.
Q3:Can you provide customization?
Yes, including winding, reduction ratio, sensor, FPC cable, output shaft, flange, and protection grade.